 Авіамоделі
Авіамоделі  Наземні моделі
Наземні моделі  Судомоделі
Судомоделі  Обладнання та аксесуари
Обладнання та аксесуари 
Меню




































Каталог


Робот-летучая лисица BionicFlyingFox – очередная биовдохновленная разработка от Festo
/upload/uf/b38/news-sobities.png
Инженеры-робототехники всемирно известного немецкого концерна Festo помимо прямых обязанностей по разработке крупного промышленного оборудования успевают уделять время и на создание роботов – копий животных и насекомых.

В одной из прошлых публикаций мы рассказывали об уникальном роботе-пауке, вышедшем из-под рук энтузиастов Festo. На этот раз создатели биовдохновленных роботов пошли дальше и представили миру летающую модель: BionicFlyingFox – это копия летучей лисицы, самого крупного представителя из семейства крылатых мышей.
В какой отрасли деятельности может пригодиться новое творение пока не известно. Известно другое: все роботы-копии представителей земной фауны – это наглядная демонстрация того, на что способен человеческий интеллект и какими могут быть современные технологии. Даже если некоторым «робопаукам», «робобабочкам» и «робострекозам» пока не найдено функциональное применение, стоит признать, что это, по крайней мере, красиво и выглядит просто потрясающе.

BionicFlyingFox, как и ее прототип, отличается крупными размерами. Размах крыльев аппарата 2,28 метра, длина – 0,87 метра, а весит модель около 500 грамм.
Крылья роболисицы изготовлены из тончайшего мембранного материала, который одновременно является сверхпрочным и сверхлегким. Плетеную основу мембраны покрывают с обеих сторон водонепроницаемые пленочки, а все три прослойки скрепляются специальной пайкой (приблизительно 45 тысяч точек).
Мембрана максимально эластична, абсолютно не мнется и полностью защищена от даже микроскопических трещин. Но даже если возникают незначительные механические повреждения – робот сохраняет способность летать.

Конструкция крыльев BionicFlyingFox – это две плоскости, которые оснащены отдельными моторами и имеют отдельные центры управления, хотя и связаны механикой. Более крупный и производительный двигатель установлен в корпусе аппарата – он обеспечивает основную тягу и подает маховое усилие на оба крыла.
BionicFlyingFox может быть запрограммирован на автономный полет, но также может управляться при помощи наземной аппаратуры дистанционного управления.
Основа системы координирования движений BionicFlyingFox – функции искусственного интеллекта. То есть с каждым последующим полетом модель становится «умнее», поскольку умеет анализировать пройденный путь в воздухе и совершенствовать свои системы под определенные условия.
Фільтр
")
")
")
")
")
629 грн
- Артикул: 6044-A-001
- Виробник: Sanlianhuan
- Тип двигуна: Колекторний (Brushed)
")
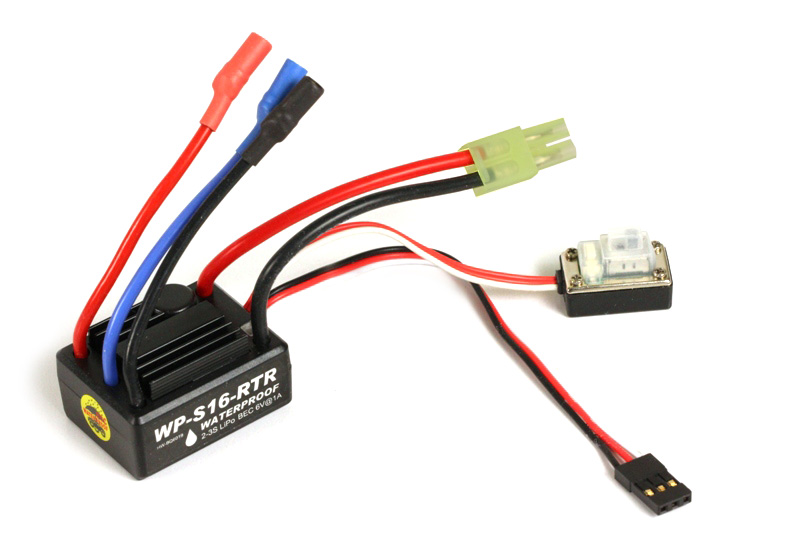
1 499 грн
- Довжина, мм: 37
- Ширина, мм: 29
- Висота, мм: 16
- Артикул: 18246
- Виробник: HSP Racing
- Тип двигуна: Безколекторний (Brushless)
- Картинки галереи: Загрузить
")
ЩЕ























{kind=link}