Авіамоделі
Авіамоделі  Наземні моделі
Наземні моделі  Судомоделі
Судомоделі  Обладнання та аксесуари
Обладнання та аксесуари 
Меню




































Каталог


Русская инструкция к квадрокоптеру DJI PHANTOM (Расширенное руководство)
/upload/uf/f94/rykovodstva.png
А1 - программное обеспечение и драйвера (установка)
Первым делом нужно убедиться в наличии у Вас программного обеспечения "NAZA-M Assistant" последней версии (как минимум - 2.0). Благодаря этому, будут получены все необходимые обновления, и правильно настроенная конфигурация квадрокоптера. В ином же случае, должна быть загружена последняя версия программного обеспечения, находящаяся на сайте изготовителя DJI.
- Далее, нужно загрузить драйвера «DJI Driver Installer» и «NAZA-M Assistant Software Installer», которые на сайте изготовителя (не странице поддержки PHANTOM - dji-innovations.com/download/phantom-downloads).
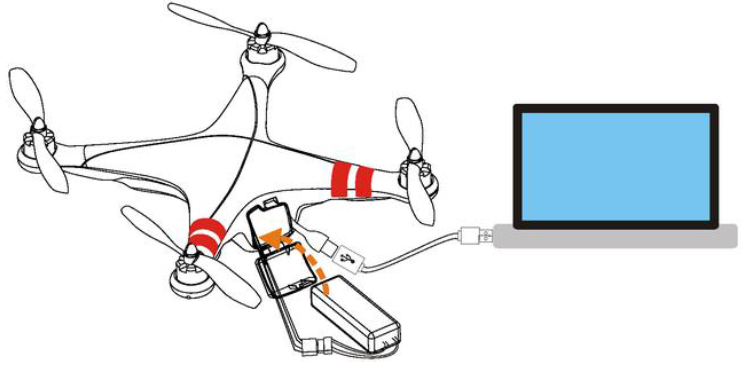
- Затем следует подключить квадрокоптер через USB порт к компьютеру, и включить его бортпитание.
- После запуска «DJI Driver Installer», следует соблюдать инструкции по первой установке драйверов, появившиеся на экране.
- После запуска «NAZA-M Assistant Software Installer», нужно соблюдать инструкции по первой установке «NAZA-M Assistant», которая появится на экране.
А2 - обновление программного обеспечения и прошивки, настройка конфигурации
- Прежде всего, нужно включить компьютер и убедится в наличие доступа к INTERNET.
- Для начала надо включить пульт управления, а затем и бортпитание квадрокоптера, и подсоединить его через USB порт к компьютеру. Ни в коем случае НЕЛЬЗЯ ОТКЛЮЧАТЬ кабель USB в тот момент, пока еще происходит процесс настройки конфигурации и/или обновляется программное обеспечение.
- Для верного применения «NAZA-M Assistant» необходимо обратить внимание на шаг №3 «Сборка и настройка конфигурации» в разделе руководства «Naza-M - Краткое руководство».
- Чтобы обновить прошивку в квадрокоптере и/или программное обеспечение «NAZA-M Assistant», необходимо обратится к приложению «Прошивка и обновление NAZA-M Assistant» в разделе руководства «Naza-M - Краткое руководство».
- При необходимости использования режима «Ручного управления», необходимо зайти в настройки конфигурации «NAZA-M Assistant» в меню «Basic/RC/Control Mode Switch» и из выпадающего списка выбрать пункт «Manual». Ознакомиться с детальным описанием данного режима можно в разделе руководства «Naza-M - Краткое руководство» шаг №1 «Тестовый полет».
А3 - установка связи приемника с пультом управления (биндинг)
Процедуру связи приемника квадрокоптера PHANTOM (PHANTOM 2 или PHANTOM 3) с пультом управления осуществляют на заводе-производителе. Если необходимо, к примеру, заменить приемник и/или пульт управления, подобную процедуру Вы можете исполнить самостоятельно. Тип приемника по умолчанию - PPM.
Не рекомендуется использование оригинального пульта управления PHANTOM вместе с использованием оборудования дистанционного управления прочего производства.
Процесс связки приемника с пультом управления:
- Для начала нужно снять корпус квадрокоптера, следуя указаниям инструкции в пункте «Снятие корпуса» раздела А8 «Техническое обслуживание».
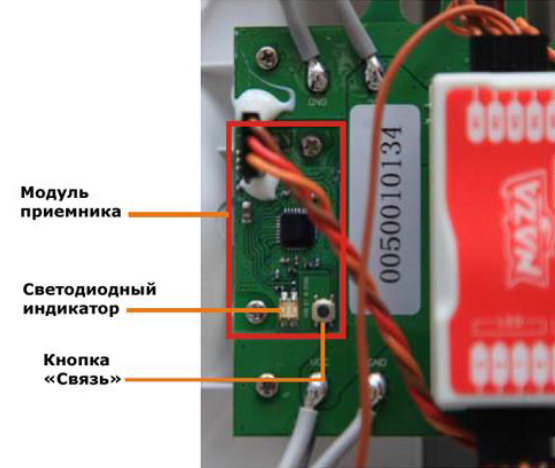
- Далее необходимо определить расположение приемника, соответственно показаному на рисунке.
- Включив питание пульта управления и бортпитания на квадрокоптере, в случае красного цвета индикатора платы приемника, это говорит о том, что приемнику не удалось связаться с пультом управления.
- Необходимо нажать и более двух секунд удерживать кнопку платы приемника «Связь», до тех пор, пока не начнет мигать индикатор, после чего нужно отпустить кнопку.
- Затем нужно на пульте управления установить рычаг газа в минимальную (нижнюю) позицию, после чего включить пульт управления. В случае угасания индикатора платы приемника - связь «приемник - пульт управления» установлена. Установить связь возможно лишь при мигании индикатора на пульте управления красным цветом, сразу же после того, как питание включено.
На заметку:
- при невозможности выхода пульта управления в режим готовности к связи с приемником, необходимо проверить действительно ли находится рычаг газа в нижней позиции.
- полноценное использование пульта управления возможно лишь при правильном завершении процесса установки связи.
А4 - смена раскладки управления на пульте управления
На пульте управления, при необходимости, может быть изменена раскладка управления (Mode1 / Mode2), ради вашего удобства. В случае смены раскладки управления, необходимо обязательное выполнение калибровки пульта управления (пункт А5 «Калибровка пульта управления»).
Раскладки управления:
Mode1:
- Газ – при отпускании, возвращения рычага в центральную позицию не происходит.
- Крен – при отпускании рычага происходит его возвращение в центральную позицию.
- Тангаж – при отпускании рычага происходит его возвращение в центральную позицию.
- Рысканье – при отпускании рычага происходит его возвращение в центральную позицию.
Mode2:
- Газ – при отпускании, возвращение рычага в центральную позицию, не происходит.
- Крен – при отпускании рычага происходит его возвращение в центральную позицию.
- Тангаж – при отпускании рычага происходит его возвращение в центральную позицию.
- Рысканье – при отпускании рычага происходит его возвращение в центральную позицию.
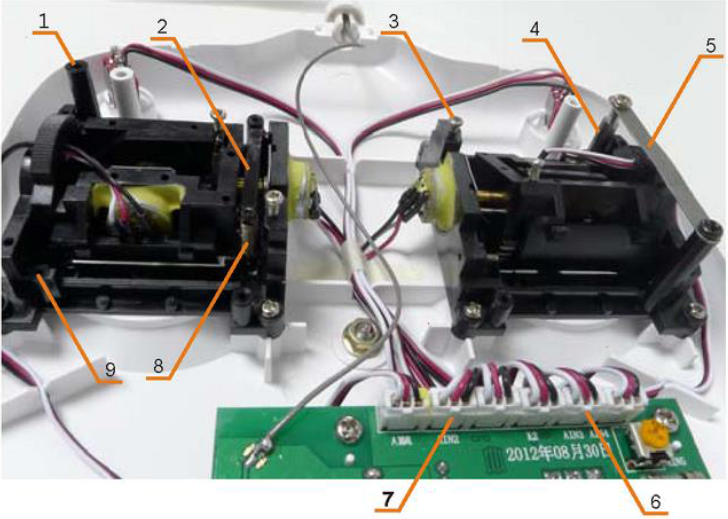
Процесс смены раскладки управления:
- Для начала необходимо снять пластину трещотки газа (5) и открутить крепежный шестигранник трещотки (4), а затем закрутить его (4) в противоположном, по диагонали, крепежном отверстии (9), и закрепить пластину трещотки газа на противоположной стороне на крепежный шестигранник (4) и стойку (1). Кроме того следует отрегулировать плавность хода в рычаге газа, путем вращения крепежного винта шестигранника трещотки (4).
- Затем следует снятие прижимной пружины (8) и центрирующей балки (2), и закрепление их в обратном порядке на противоположной стороне. Далее нужно отрегулировать плавность хода в рычаге Тангаж/Рысканье, используя крепежный винт (3) центрирующей балки. (Необходимо быть очень внимательными и осторожными, во время снятия/закрепления прижимной пружины, дабы избежать ее повреждения или потери, также следует контролировать ее натяжение).
- После этого нужно поменять между собой подсоединения разъемов 2-го (AIN2) и 3-го (AIN3) каналов. (Необходимо быть внимательными чтобы подключить разъемы в правильном направлении).
Условные обозначения:
- Стойка крепежная
- Балка центрирующая
- Винт крепежный
- Шестигранник трещотки крепежный
- Пластина трещотки газа
- Канал 3
- Канал 2
- Пружина прижимная
- Отверстие крепежное
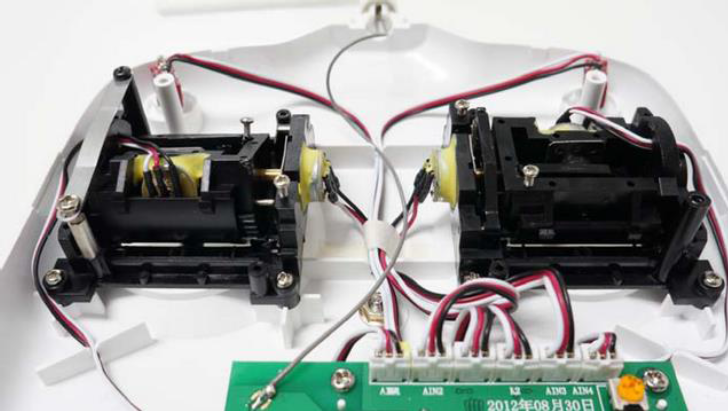
На ниже приведенном специалистами rc-hobby.com.ua рисунке показан пример с правильным результатом смены раскладки управления с Mode 2 на Mode 1
А5 - калибровка пульта управления
В случае смены раскладки управления на пульте управления, или его калибровка не осуществлялась на протяжении длительного времени, необходимо выполнение повторной калибровки.
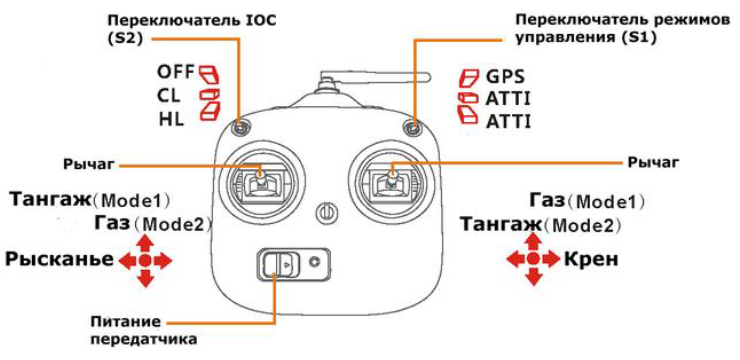
CL - Удерживание курса
HL - Удерживание точки взлета
Процесс калибрования пульта управления
- Для начала, как утверждают профессионалы RC-Hobby, необходимо установление переключателя S2 в положение OFF, а переключателя S1 в положение GPS.
- Далее надо переместить рычаги газа и тангажа в верхнее положение (максимального газа + максимального наклона вперед). Рычаг тангажа следует вручную удерживать в верхнем положении, поскольку после отпускания он возвратится в центральную позицию.
- В момент включения пульта управления, будет слышно повторение звукового сигнала «Ди---Ди Ди» на пульте управления. При установке переключателя S2 в положение CL, будет слышен звуковой сигнал «Ди», который свидетельствует о переходе пульта управления в режим калибрования. (При выполнении указанных выше пунктов, необходимо соблюдать верхнюю позицию рычагов газа и тангажа).
- Затем рычаг тангажа нужно отпустить, а рычаг газа передвинуть в центральное положение (50% газа). При установке переключателя S1 в положение ATTI, будет слышным звук «Ди». Услышав сигнал, нужно несколько раз подвигать оба рычаги по кругу, чтобы зафиксировать максимальные точки отклонения рычагов от центральной позиции. Затем следует опустить рычаг газа в нижнюю позицию (0% газа) и установить переключатель S2 в положение HL, после чего будет слышен звуковой сигнал «Ди», индикатор пульта управления мигнет некое количество раз, и затем войдет в рабочий режим управления. Это свидетельствует об успешном завершении процедуры калибровки.
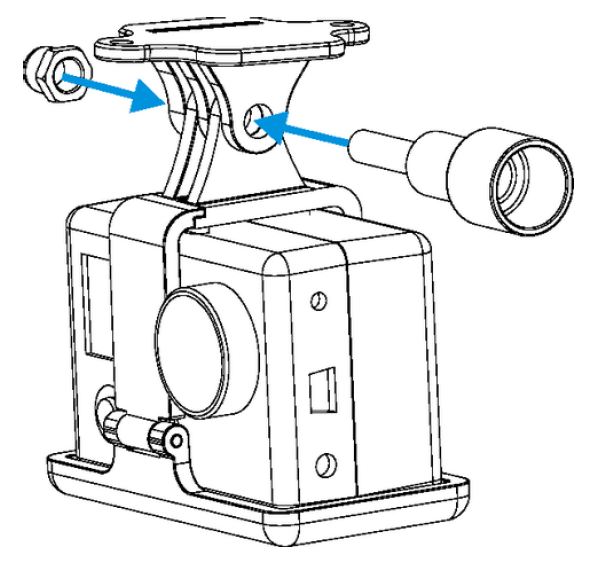
А6 - установка камеры и подвеса
Установление, при необходимости, фото/видео камеры на квадрокоптере возможно, используя специальный подвес, входящий в набор квадрокоптера PHANTOM.
- Камера устанавливается на подвес, аналогичным способом, показанным на рисунке.
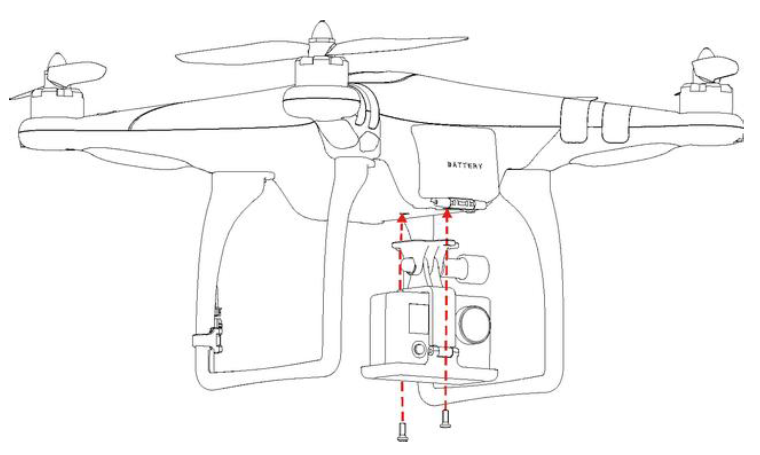
- Затем нужно закрепить на квадрокоптере подвес с камерой.
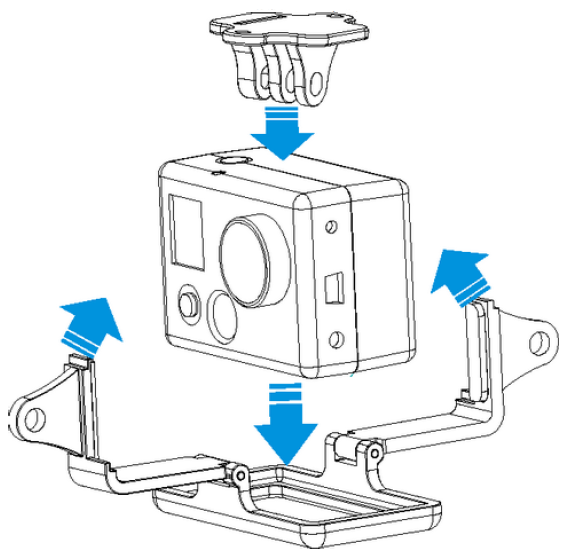
Обязательно нужно убедиться в использовании соответствующих крепежных винтов М3,0*6.
Внимание!!! RC-Hobby предупреждает. При использовании более длинных крепежных винтов, возможно повреждение силового аккумулятора, что может вызвать возгорание и пожар, а также может привести к выходу квадрокоптера из строя.
А7 – функция интеллектуального управления полетом (IOC)
(допустимо лишь используя компас и модуль GPS)
Функция интеллектуального управления по умолчанию отключена, и для ее активации нужно включить интеллектуальное управление в настройках «NAZA-M Assistant».
Направление движения «Вперед»: при задействовании рычага Тангажа, полет квадрокоптера будет осуществляться лишь по этому направлению.
Графические обозначения:

Перед началом
Как правило, курс движения «вперед» соответствует направлению носовой части на квадрокоптере, поскольку обычно он летает носовой частью вперед. Используя режимы IOC курс движения «вперед» может не соответствовать направлению носовой части на квадрокоптере.
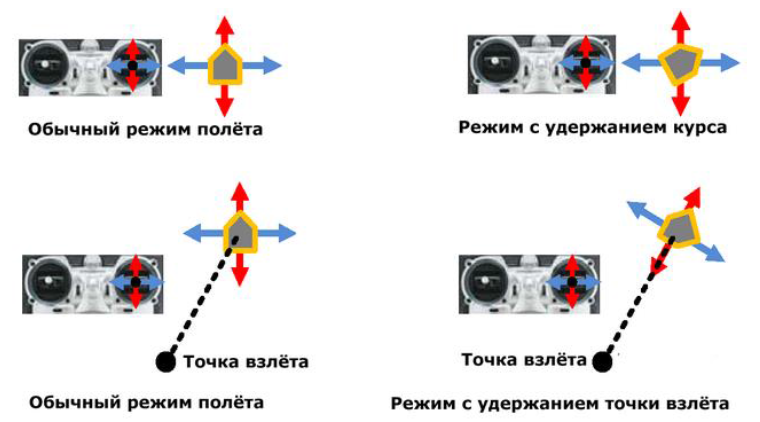
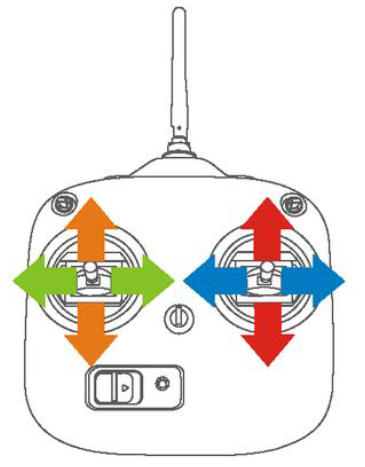
Режим Удерживания Курса (CL) - курс движения "вперед" соответствует записанному направлению движения носовой части на квадрокоптере. Обратив внимание на рисунок, Вы заметите соответствие красных и сини стрелок пульта управления командам Тангаж (вперед/назад) и Крен (левый/правый).
Режим Удерживания Точки Взлета (HL) - курс движения "вперед" соответствует направлению вектора от внесенной взлетной точки до точки текущего местоположения квадрокоптера. Посмотрев на рисунок, Вы заметите соответствие красных и синих стрелок пульта управления командам Тангаж (вперед/назад) и Крен (левый/правый).
Процесс записи курса движения «вперед» и фиксации взлетной точки
При использовании режима «интеллектуальное управление полетом», ни в коем случае нельзя забывать направления движения «вперед» во время режима Удержание Курса и взлетную точку во время режима Удержание Точки Взлета. Направление «вперед» и точку взлета можно записывать двумя вариантами: автоматически или вручную. Выбирайте любой, самый удобный для Вас, вариант.
Необходимо помнить!
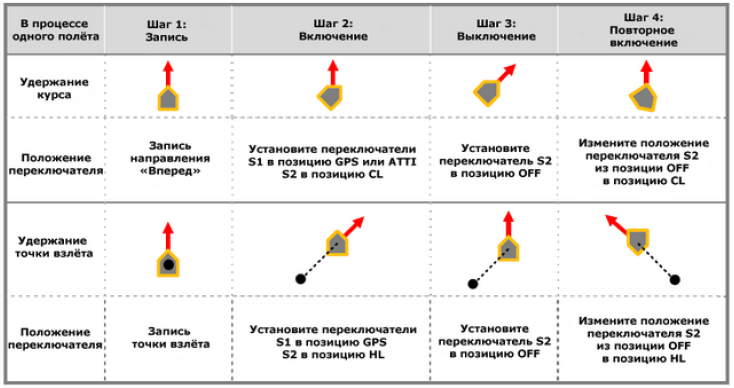
Носовая часть (ее направление) на квадрокоптере автоматически запоминается в течение 30 с после его включения. В момент начала движения рычага газа, текущее положение квадрокоптера перед моментом взлета автоматически запишется как взлетная точка (только при условии обнаружения модулем GPS как минимум 6-ти спутников перед моментом взлета).
При быстрой перемене позиций переключателя S2 между OFF и CL положениями (3-5 раз), текущее направление носовой части на квадрокоптере запишется в виде нового направления движения «вперед» (на протяжении 30 с после момента включения питания квадрокоптера OFF->CL->OFF одновременно). При обнаружении GPS модулем 6-ти и более спутников, есть возможность быстрого изменения позиции переключателя S2 между положениями CL и HL (3-5 раз), чтобы записать, таким образом, текущую позицию квадрокоптера как новую взлетную точку (CL->HL->CL).
Процесс тестирования интеллектуального управления полетом
Режим «интеллектуальное управление полетом» следует проверять следующим образом:
Свойства режимов интеллектуального управления
- При успешной записи будет быстро мигать зеленый цвет индикатора состояния. Исключительно в положении интеллектуального режима управления будет наблюдаться медленное мигание поочередно желтого и зеленого цвета индикатора состояния, во время пребывания квадрокоптера в положении готовности к полету в режиме Удержание Курса и в режиме Удержание Точки Взлета.
- Совершение полетов в режиме Удержание Точки Взлета возможно при обнаружении GPS модулем как минимум 6-ти спутников и при пребывании квадрокоптера на расстоянии более 10 м от взлетной точки.
- Перед переходом к режиму Удержание Точки Взлета, нужно отлететь квадрокоптером более чем на 10 м от взлетной точки, а выключатель S2 после этого перевести в положение HL и лететь квадрокоптером при активном режиме Удержание Точки Взлета. Во время первого включения режима Удержание Точки Взлета (HL) при полете, во время нахождения квадрокоптера на расстоянии от точки взлета менее чем 10 м, в случае подходящих к полету в режиме HL условий, произойдет автоматической переход квадрокоптера в данный режим, в момент преодоления им 10-ти метровой дистанции от начальной взлетной точки.
- При полете в режиме HL, произойдет автоматический выход квадрокоптера из режима HL и переключение в режим CL (полети вдоль направления носовой части на квадрокоптере записанного ранее), в случае происшествия одного из событий описанных ниже:
- Вхождение квадрокоптера в полетную зону радиусом меньше чем 10 м от взлетной точки;
- При активировании полетного режима ATTI;
- В случае ухудшения условий приема сигналов GPS (2/3-х кратное мигание красного индикатора состояния).
- При полете, во время нахождения квадрокоптера вдали от Вас и от взлетной точки, ни в коем случае нельзя совершать многократные, быстрые переключения при помощи переключателя IOS (OFF-CL-HL), ради избегания произвольного записывания новой взлетной точки и нового направления носовой части на квадрокоптере.
- У Вас должно быть четкое понимание, какой именно полетный режим вами используется, а также нахождение точки начального взлета, и записанного в памяти квадрокоптера направления носовой части, перед моментом активирования интеллектуального управления полетом (IOC).
- Процесс длительного быстрого вращения квадрокоптера (пируэта) может вызвать возникновение ошибок управления рысканья (направления курса) на квадрокоптере. В подобной ситуации необходима остановка или замедление выполнения пируэта, и тем самим стабилизация полетных характеристик на квадрокоптере.
А8 - техническое обслуживание
1. Снятие корпуса
- Окрутить и снять несущие пропеллеры на квадрокоптере;
- Открутить крепежные винты, показанные на рисунке, при использовании подходящего инструмента, и затем снять корпус.
Приметки
- Помните об обязательном хранении мелких запчастей, на подобии крепежных винтов, в специальном месте, которое недоступно для детей;
- АБСОЛЮТНО НЕ РЕКОМЕНДОВАНО ИСПОЛЬЗОВАНИЕ фиксатора резьбовых соединений, чтоо может вызвать повреждение корпуса и прочих деталей квадрокоптера.

2. Внешнее питание
Если необходимо подключить к квадрокоптеру дополнительное оборудование, это можно сделать благодаря установленному на нем специальному кабелю для вывода питания наружу. Значение напряжения этого кабеля, соответствует значению напряжения на силовом аккумуляторе квадрокоптера. Положительный полюс (+) соответствует красному проводу, отрицательный полюс (-) – серому. Провода красного и серого цвета не должны соприкасаться, чтобы предотвратить короткое замыкание.
Кабель для вывода внешнего питания

Фільтр
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")